





















Todos los productos
-
Motor de bobina de voz Vcm
-
motor de bobina de voz linear
-
Motor rotativo de bobina de voz
-
Motores de vibración
-
Actuador de bobina de voz lineal
-
Actuador de motor lineal
-
Completamente actuador de la bobina de voz de la casa
-
Motor hueco de la base
-
Actuador de alto rendimiento
-
Módulos de motor
-
motor servo linear
-
regulador del motor servo
Motor de micro bobina de voz Mechine de alimentación flexible de motor DC Robótica








| Lugar de origen | Jiangsu, China |
|---|---|
| Nombre de la marca | SUPT |
| Certificación | ce,ISO9001,CCC |
| Número de modelo | VCAZ0020-0040 |
| Cantidad de orden mínima | ≥1 |
| Precio | $112.00/pieces >=1 pieces |
| Detalles de empaquetado | & del cartón; motor de la vibración de la caja de madera |
| Tiempo de entrega | 1-5 el envío de los días de los productos 5-7, muestrea 3-5 días, de a granel para ser negociado |
| Condiciones de pago | T/T |
| Capacidad de la fuente | 3000 piezas por mes |
Datos del producto
| Garantización | 3 meses-1 año | Utilización | BARCO, coche, bicicleta eléctrica, 3D impresión, microscopio, robot, ventiladores médicos, proyecto |
|---|---|---|---|
| El tipo | Micromotor | Torque de trabajo | Las solicitudes |
| Construcción | Imán permanente | Conmutación | El cepillo |
| Proteger la característica | Totalmente cerrado | Velocidad (RPM) | 50 |
| Corriente continua (A) | 2,6 | Eficiencia | IE 1 |
| Fuerza máxima ((N) | 20.5 | Velocidad máxima (mm) | 3.0 |
| motor de la vibración (V) | 25,9 | (G) del peso del actuador | 375 |
| Fuerza continua ((N) | 8,9 | Puerto | Motor de vibración de Shanghai |
| Resaltar | Motor de bobina de micro voz 2.6A,Motor de la bobina de voz de alimentación de la máquina,Mechine de alimentación de motor Dc robótica 2.6A |
||
Descripción de producto
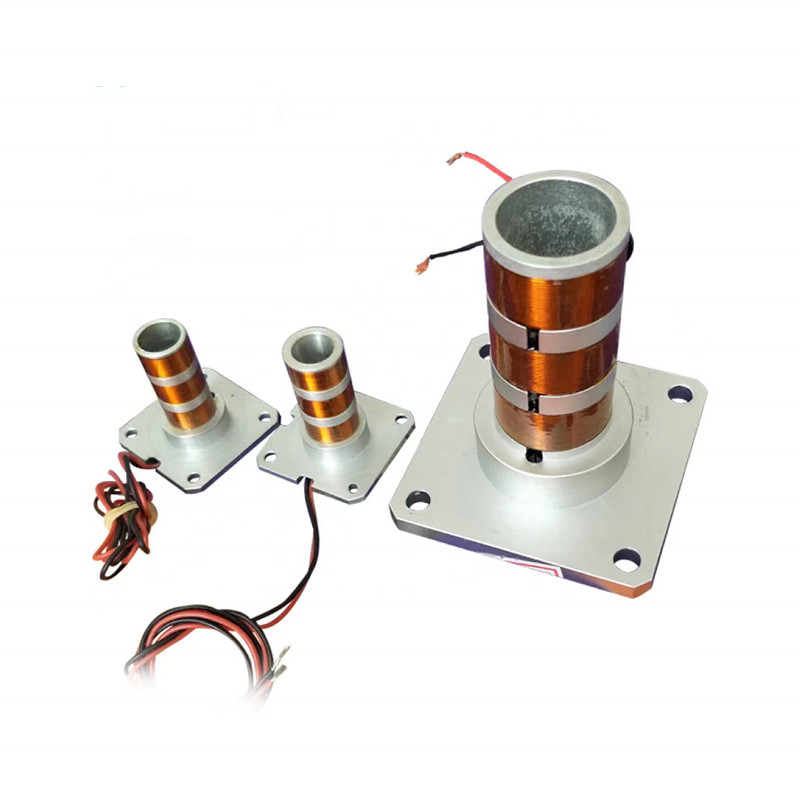
Motor de bobina de voz Mecanismo de alimentación flexible Motor de vibración integrado
Descripción del producto
Los motores de bobina de voz vibrante pueden lograr una alimentación de vibración flexible ajustando sus parámetros de trabajo y diseñando estructuras mecánicas adecuadas.Los siguientes son algunos métodos y pasos para describir cómo lograr una alimentación de vibración flexible utilizando motores de bobina de voz de vibración:
1Determinar la frecuencia y la amplitud de funcionamiento: En primer lugar, debemos determinar la frecuencia y la amplitud de funcionamiento adecuadas para la alimentación de vibración flexible.Estos parámetros afectarán la naturaleza y el efecto de la vibración.
2Diseño de la estructura mecánica: De acuerdo con los requisitos de la aplicación, diseña una estructura mecánica adecuada para conectar el motor de bobina de voz vibrante al objeto o componente a alimentar.La estructura mecánica puede incluir un marco de apoyo, una plataforma de vibración, una pista de guía, etc.
3. Instalación de un motor de bobina de voz vibrante: Instale el motor de bobina de voz vibrante en una estructura mecánica para asegurarse de que produce el efecto de vibración deseado.el eje de vibración del motor de bobina de voz de vibración corresponde a la dirección de vibración deseada.
4Ajuste de los parámetros del motor: ajuste de los parámetros de funcionamiento del motor de bobina de voz vibratoria, como la corriente, la frecuencia y la amplitud, basándose en los requisitos de alimentación de vibración flexible.Estos parámetros afectarán directamente a las características de la vibración.
5Control de retroalimentación: con la ayuda de sensores o sistemas de control de retroalimentación, la vibración durante el proceso de alimentación se controla en tiempo real.Ajuste los parámetros del motor de bobina de voz vibrante basado en la información de retroalimentación para lograr una alimentación de vibración flexible precisa.
6. Pruebas de ejecución: Prueba y depuración durante el funcionamiento real. Ajuste gradualmente los parámetros del motor de bobina de voz vibrante para optimizar el efecto de la alimentación de vibración flexible.
7- Adaptación a diferentes objetos: si es necesario alimentar objetos de diferentes tipos o tamaños,puede ser necesario ajustar la estructura mecánica y los parámetros de vibración para adaptarse a diferentes piezas de trabajo.
8Optimización del modo de vibración: Optimización del modo de vibración de acuerdo con los requisitos reales de la aplicación para garantizar que la alimentación de vibración flexible pueda lograr un posicionamiento preciso, transmisión,y manejo.
9Consideraciones de seguridad: durante el proceso de diseño y operación debe tenerse en cuenta la seguridad para evitar que los objetos se resbalen, caigan de la plataforma de vibración,o causando otras situaciones inesperadas.
Aplicación:
El motor de bobina de voz de vibración flexible tiene un tiempo de respuesta corto, alta frecuencia de vibración, buena inducción y estabilidad.Estos motores están diseñados para proporcionar fiables, funcionamiento eficiente y de baja corriente, lo que los hace ideales para aplicaciones tales como pantallas vibratorias, transportadores vibratorios, alimentadores vibratorios, maquinaria vibratoria,equipos médicos, automotrices y otros equipos industrialesTambién son ideales para aplicaciones con altos requisitos de potencia y vibración, como en las operaciones de mecanizado y ensamblaje de precisión.Se pueden utilizar en una variedad de aplicaciones, incluyendo motores de vibración, motores de bobina de vibración flexible, motores de actuador de vibración, y nuestro diseño de motor de vibración para proporcionar un rendimiento confiable y duradero.
Parámetros técnicos:
| Noconstante de inclinación |
VALOR |
Unidad |
| D.C.la resistencia | 10.2 | Oh |
| Válvula de tensión@Fp |
25.9 | V. |
| Corriente @ Fp |
2.6 | A. No |
| Yo...- ¿Cuál es el problema? |
1.3 | mH |
| PFuerza de eck |
20.5 | No |
| C. Lasen vigor |
8.9 | No |
| A. Noconstante de flujo |
2.55 | - ¿ Por qué? |
| Potencia @ Fp |
65.3 | No |
| T.el golpe total |
3 | En el caso de los |
| M.temperatura de enrollamiento del eje |
150 | oC |
| A. Nopeso del ctuador |
110 | G |
![]()
![]()
Nuestros servicios
Indicadores técnicos y especificaciones pueden ser personalizados
Servicio posventa satisfactorio
![]()
Información sobre la empresa
![]()
Embalaje y envío
![]()
Certificaciones
![]()
Preguntas frecuentes
el estator:
1Viajes: viajes efectivos, utilizados para calcular el el total de viajesde lasvalor de la fuerza.
2- Dirección de movimiento: instalación horizontal o vertical 90 grados.
3Fuerza de carga:cinstantánea en la dirección inversa defuerzaen elmotor, tales como resortes, etc.
4.Peso de carga: la parte de calidad total del movimiento, incluido el control deslizante de calidad
5Tipo de movimiento: 1.movimiento de punto a punto;2.la reciprocidad de la regla (por ejemplo, escaneo).
6. Curva de velocidad: 1.una curva de velocidad trapezoidal;2.curva de velocidad triangular; 3.Curva de velocidad sinusoidal.
¡Apreciamos su trabajo!
Productos recomendados